Explore the curious case of Snapchat AI’s sudden story appearance. Delve into the possibilities of hacking and the true story behind the phenomenon. Curious about why your Snapchat AI suddenly has a story? Uncover the truth behind the phenomenon and put to rest concerns about whether Snapchat AI has been hacked. Explore the evolution of AI-generated stories, debunking hacking myths, and gain insights into how technology is reshaping social media experiences. Decoding the Mystery of Snapchat AI’s Unusual Story The Enigma Unveiled: Why Does My Snapchat AI Have a Story? Snapchat AI’s Evolutionary Journey Personalization through Data Analysis Exploring the Hacker Hypothesis: Did Snapchat AI Get Hacked? The Hacking Panic Unveiling the Truth Behind the Scenes: The Reality of AI-Generated Stories Algorithmic Advancements User Empowerment and Control FAQs Why did My AI post a Story? Did Snapchat AI get hacked? What should I do if I’m concerned about My AI? What is My AI...
Get link
Facebook
X
Pinterest
Email
Other Apps
Application of differentiations in neural networks
Get link
Facebook
X
Pinterest
Email
Other Apps
Last Updated on March 16, 2023
Differential calculus is a crucial instrument in machine learning algorithms. Neural networks particularly, the gradient descent algorithm relies upon upon the gradient, which is a quantity computed by differentiation.
In this tutorial, we’re going to see how the back-propagation method is utilized in discovering the gradients in neural networks.
After ending this tutorial, you may know
What is a whole differential and full by-product
How to compute the complete derivatives in neural networks
How back-propagation helped in computing the complete derivatives
Let’s get started
Application of differentiations in neural networks Photo by Freeman Zhou, some rights reserved.
Tutorial overview
This tutorial is break up into 5 components; they’re:
Total differential and full derivatives
Algebraic illustration of a multilayer perceptron model
Finding the gradient by back-propagation
Matrix sort of gradient equations
Implementing back-propagation
Total differential and full derivatives
For a carry out resembling $f(x)$, we title denote its by-product as $f'(x)$ or $frac{df}{dx}$. But for a multivariate carry out, resembling $f(u,v)$, we have a partial by-product of $f$ with respect to $u$ denoted as $frac{partial f}{partial u}$, or sometimes written as $f_u$. A partial by-product is obtained by differentiation of $f$ with respect to $u$ whereas assuming the alternative variable $v$ is a unbroken. Therefore, we use $partial$ as an alternative of $d$ as a result of the picture for differentiation to counsel the excellence.
However, what if the $u$ and $v$ in $f(u,v)$ are every carry out of $x$? In completely different phrases, we’ll write $u(x)$ and $v(x)$ and $f(u(x), v(x))$. So $x$ determines the price of $u$ and $v$ and in flip, determines $f(u,v)$. In this case, it is utterly great to ask what’s $frac{df}{dx}$, as $f$ is finally determined by $x$.
This is the thought of full derivatives. In reality, for a multivariate carry out $f(t,u,v)=f(t(x),u(x),v(x))$, we always have $$ frac{df}{dx} = frac{partial f}{partial t}frac{dt}{dx} + frac{partial f}{partial u}frac{du}{dx} + frac{partial f}{partial v}frac{dv}{dx} $$ The above notation is known as the complete by-product because of it is sum of the partial derivatives. In essence, it is making use of chain rule to hunt out the differentiation.
If we take away the $dx$ half throughout the above equation, what we get is an approximate change in $f$ with respect to $x$, i.e., $$ df = frac{partial f}{partial t}dt + frac{partial f}{partial u}du + frac{partial f}{partial v}dv $$ We title this notation the complete differential.
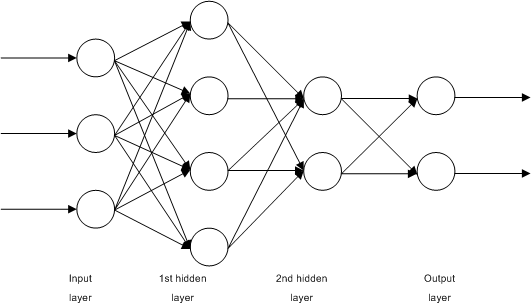
Algebraic illustration of a multilayer perceptron model
This is a straightforward, fully-connected, 4-layer neural neighborhood. Let’s title the enter layer as layer 0, the two hidden layers the layer 1 and a pair of, and the output layer as layer 3. In this picture, we see that we have $n_0=3$ enter fashions, and $n_1=4$ fashions throughout the first hidden layer and $n_2=2$ fashions throughout the second enter layer. There are $n_3=2$ output fashions.
If we denote the enter to the neighborhood as $x_i$ the place $i=1,cdots,n_0$ and the neighborhood’s output as $hat{y}_i$ the place $i=1,cdots,n_3$. Then we’ll write
Here the activation carry out at layer $i$ is denoted as $f_i$. The outputs of first hidden layer are denoted as $h_{1i}$ for the $i$-th unit. Similarly, the outputs of second hidden layer are denoted as $h_{2i}$. The weights and bias of unit $i$ in layer $okay$ are denoted as $w^{(okay)}_{ij}$ and $b^{(okay)}_i$ respectively.
In the above, we’ll see that the output of layer $k-1$ will feed into layer $okay$. Therefore, whereas $hat{y}_i$ is expressed as a carry out of $h_{2j}$, nonetheless $h_{2i}$ may also be a carry out of $h_{1j}$ and in flip, a carry out of $x_j$.
The above describes the event of a neural neighborhood by the use of algebraic equations. Training a neural neighborhood would want to specify a *loss carry out* as successfully so we’ll lower it throughout the teaching loop. Depends on the making use of, we typically use cross entropy for categorization points or indicate squared error for regression points. With the purpose variables as $y_i$, the indicate sq. error loss carry out is specified as $$ L = sum_{i=1}^{n_3} (y_i-hat{y}_i)^2 $$
Want to Get Started With Calculus for Machine Learning?
Take my free 7-day e mail crash course now (with sample code).
Click to sign-up and as well as get a free PDF Ebook mannequin of the course.
Finding the gradient by back-propagation
In the above assemble, $x_i$ and $y_i$ are from the dataset. The parameters to the neural neighborhood are $w$ and $b$. While the activation options $f_i$ are by design the outputs at each layer $h_{1i}$, $h_{2i}$, and $hat{y}_i$ are dependent variables. In teaching the neural neighborhood, our purpose is to exchange $w$ and $b$ in each iteration, notably, by the gradient descent change rule: $$ begin{aligned} w^{(okay)}_{ij} &= w^{(okay)}_{ij} – eta frac{partial L}{partial w^{(okay)}_{ij}} b^{(okay)}_{i} &= b^{(okay)}_{i} – eta frac{partial L}{partial b^{(okay)}_{i}} end{aligned} $$ the place $eta$ is the academic worth parameter to gradient descent.
From the equation of $L$ everyone knows that $L$ is not going to be relying on $w^{(okay)}_{ij}$ or $b^{(okay)}_i$ nonetheless on $hat{y}_i$. However, $hat{y}_i$ can be written as carry out of $w^{(okay)}_{ij}$ or $b^{(okay)}_i$ finally. Let’s see one after the opposite how the weights and bias at layer $okay$ can be associated to $hat{y}_i$ on the output layer.
We begin with the loss metric. If we take into consideration the dearth of a single information stage, we have $$ begin{aligned} L &= sum_{i=1}^{n_3} (y_i-hat{y}_i)^2 frac{partial L}{partial hat{y}_i} &= 2(y_i – hat{y}_i) & textual content material{for } i &= 1,cdots,n_3 end{aligned} $$ Here we see that the loss carry out relies upon upon all outputs $hat{y}_i$ and resulting from this reality we’ll uncover a partial by-product $frac{partial L}{partial hat{y}_i}$.
Now let’s check out the output layer: $$ begin{aligned} hat{y}_i &= f_3(sum_{j=1}^{n_2} w^{(3)}_{ij} h_{2j} + b^{(3)}_i) & textual content material{for }i &= 1,cdots,n_3 frac{partial L}{partial w^{(3)}_{ij}} &= frac{partial L}{partial hat{y}_i}frac{partial hat{y}_i}{partial w^{(3)}_{ij}} & i &= 1,cdots,n_3; j=1,cdots,n_2 &= frac{partial L}{partial hat{y}_i} f’_3(sum_{j=1}^{n_2} w^{(3)}_{ij} h_{2j} + b^{(3)}_i)h_{2j} frac{partial L}{partial b^{(3)}_i} &= frac{partial L}{partial hat{y}_i}frac{partial hat{y}_i}{partial b^{(3)}_i} & i &= 1,cdots,n_3 &= frac{partial L}{partial hat{y}_i}f’_3(sum_{j=1}^{n_2} w^{(3)}_{ij} h_{2j} + b^{(3)}_i) end{aligned} $$ Because the burden $w^{(3)}_{ij}$ at layer 3 applies to enter $h_{2j}$ and impacts output $hat{y}_i$ solely. Hence we’ll write the by-product $frac{partial L}{partial w^{(3)}_{ij}}$ as a result of the product of two derivatives $frac{partial L}{partial hat{y}_i}frac{partial hat{y}_i}{partial w^{(3)}_{ij}}$. Similar case for the bias $b^{(3)}_i$ as successfully. In the above, we make use of $frac{partial L}{partial hat{y}_i}$, which we already derived beforehand.
But in reality, we’ll moreover write the partial by-product of $L$ with respect to output of second layer $h_{2j}$. It is not going to be used for the change of weights and bias on layer 3 nonetheless we’re going to see its significance later: $$ begin{aligned} frac{partial L}{partial h_{2j}} &= sum_{i=1}^{n_3}frac{partial L}{partial hat{y}_i}frac{partial hat{y}_i}{partial h_{2j}} & textual content material{for }j &= 1,cdots,n_2 &= sum_{i=1}^{n_3}frac{partial L}{partial hat{y}_i}f’_3(sum_{j=1}^{n_2} w^{(3)}_{ij} h_{2j} + b^{(3)}_i)w^{(3)}_{ij} end{aligned} $$ This one is the attention-grabbing one and completely completely different from the sooner partial derivatives. Note that $h_{2j}$ is an output of layer 2. Each and every output in layer 2 will impact the output $hat{y}_i$ in layer 3. Therefore, to hunt out $frac{partial L}{partial h_{2j}}$ now we have so as to add up every output at layer 3. Thus the summation sign throughout the equation above. And we’ll take into consideration $frac{partial L}{partial h_{2j}}$ as the complete by-product, by which we utilized the chain rule $frac{partial L}{partial hat{y}_i}frac{partial hat{y}_i}{partial h_{2j}}$ for every output $i$ after which sum them up.
In the equations above, we’re reusing $frac{partial L}{partial h_{2i}}$ that we derived earlier. Again, this by-product is computed as a sum of a lot of merchandise from the chain rule. Also very like the sooner, we derived $frac{partial L}{partial h_{1j}}$ as successfully. It is not going to be used to teach $w^{(2)}_{ij}$ nor $b^{(2)}_i$ nonetheless will in all probability be used for the layer prior. So for layer 1, we have
and this completes all the derivatives needed for teaching of the neural neighborhood using gradient descent algorithm.
Recall how we derived the above: We first start from the loss carry out $L$ and uncover the derivatives one after the opposite throughout the reverse order of the layers. We write down the derivatives on layer $okay$ and reuse it for the derivatives on layer $k-1$. While computing the output $hat{y}_i$ from enter $x_i$ begins from layer 0 forward, computing gradients are throughout the reversed order. Hence the determine “back-propagation”.
Matrix sort of gradient equations
While we did not use it above, it is cleaner to put in writing down the equations in vectors and matrices. We can rewrite the layers and the outputs as: $$ mathbf{a}_k = f_k(mathbf{z}_k) = f_k(mathbf{W}_kmathbf{a}_{k-1}+mathbf{b}_k) $$ the place $mathbf{a}_k$ is a vector of outputs of layer $okay$, and assume $mathbf{a}_0=mathbf{x}$ is the enter vector and $mathbf{a}_3=hat{mathbf{y}}$ is the output vector. Also denote $mathbf{z}_k = mathbf{W}_kmathbf{a}_{k-1}+mathbf{b}_k$ for consolation of notation.
Under such notation, we’ll signify $frac{partial L}{partialmathbf{a}_k}$ as a vector (so that of $mathbf{z}_k$ and $mathbf{b}_k$) and $frac{partial L}{partialmathbf{W}_k}$ as a matrix. And then if $frac{partial L}{partialmathbf{a}_k}$ is assumed, we have $$ begin{aligned} frac{partial L}{partialmathbf{z}_k} &= frac{partial L}{partialmathbf{a}_k}odot f_k'(mathbf{z}_k) frac{partial L}{partialmathbf{W}_k} &= left(frac{partial L}{partialmathbf{z}_k}correct)^prime cdot mathbf{a}_k frac{partial L}{partialmathbf{b}_k} &= frac{partial L}{partialmathbf{z}_k} frac{partial L}{partialmathbf{a}_{k-1}} &= left(frac{partialmathbf{z}_k}{partialmathbf{a}_{k-1}}correct)^topcdotfrac{partial L}{partialmathbf{z}_k} = mathbf{W}_k^topcdotfrac{partial L}{partialmathbf{z}_k} end{aligned} $$ the place $frac{partialmathbf{z}_k}{partialmathbf{a}_{k-1}}$ is a Jacobian matrix as every $mathbf{z}_k$ and $mathbf{a}_{k-1}$ are vectors, and this Jacobian matrix happens to be $mathbf{W}_k$.
Implementing back-propagation
We need the matrix sort of equations because of it may well make our code simpler and averted various loops. Let’s see how we’ll convert these equations into code and make a multilayer perceptron model for classification from scratch using numpy.
The very very first thing now we have to implement the activation carry out and the loss carry out. Both needs to be differentiable options or in another case our gradient descent course of would not work. Nowadays, it’s normal to utilize ReLU activation throughout the hidden layers and sigmoid activation throughout the output layer. We define them as a carry out (which assumes the enter as numpy array) along with their differentiation:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
import numpy asnp
# Find a small float to avoid division by zero
epsilon=np.finfo(float).eps
# Sigmoid carry out and its differentiation
def sigmoid(z):
return1/(1+np.exp(–z.clip(–500,500)))
def dsigmoid(z):
s=sigmoid(z)
return2*s *(1–s)
# ReLU carry out and its differentiation
def relu(z):
returnnp.most(0,z)
def drelu(z):
return(z>0).astype(float)
We deliberately clip the enter of the sigmoid carry out to between -500 to +500 to avoid overflow. Otherwise, these options are trivial. Then for classification, we care about accuracy nonetheless the accuracy carry out is not going to be differentiable. Therefore, we use the cross entropy carry out as loss for teaching:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
# Loss carry out L(y, yhat) and its differentiation
def cross_entropy(y,yhat):
“”“Binary cross entropy carry out
L = – y log yhat – (1-y) log (1-yhat)
Args:
y, yhat (np.array): 1xn matrices which n are the number of information conditions
Returns:
frequent cross entropy price of type 1×1, averaging over the n conditions
In the above, we assume the output and the purpose variables are row matrices in numpy. Hence we use the dot product operator @ to compute the sum and divide by the number of parts throughout the output. Note that this design is to compute the frequent cross entropy over a batch of samples.
Then we’ll implement our multilayer perceptron model. To make it less complicated to study, we have to create the model by providing the number of neurons at each layer along with the activation carry out on the layers. But on the same time, we would moreover need the differentiation of the activation options along with the differentiation of the loss carry out for the teaching. The loss carry out itself, nonetheless, is not going to be required nonetheless useful for us to hint the progress. We create a class to ensapsulate your complete model, and description each layer $okay$ in response to the parts: $$ mathbf{a}_k = f_k(mathbf{z}_k) = f_k(mathbf{a}_{k-1}mathbf{W}_k+mathbf{b}_k) $
# z = W a + b, with `a` as output from earlier layer
# `W` is of dimension rxs and `a` the dimensions sxn with n the number of information conditions, `z` the dimensions rxn
# `b` is rx1 and broadcast to each column of `z`
self.z[l]=(self.a[l–1]@self.W[l])+self.b[l]
# a = g(z), with `a` as output of this layer, of dimension rxn
self.a[l]=func(self.z[l])
returnself.a[–1]
The variables on this class z, W, b, and a are for the forward cross and the variables dz, dW, db, and da are their respective gradients that to be computed throughout the back-propagation. All these variables are supplied as numpy arrays.
As we’re going to see later, we’ll examine our model using information generated by scikit-learn. Hence we’re going to see our information in numpy array of type “(number of samples, number of features)”. Therefore, each sample is obtainable as a row on a matrix, and in carry out forward(), the burden matrix is right-multiplied to each enter a to the layer. While the activation carry out and dimension of each layer can be completely completely different, the tactic is analogous. Thus we transform the neural neighborhood’s enter x to its output by a loop throughout the forward() carry out. The neighborhood’s output is solely the output of the ultimate layer.
To follow the neighborhood, now we have to run the back-propagation after each forward cross. The back-propagation is to compute the gradient of the burden and bias of each layer, starting from the output layer to the enter layer. With the equations we derived above, the back-propagation carry out is carried out as:
The solely distinction proper right here is that we compute db not for one teaching sample, nonetheless to your complete batch. Since the loss carry out is the cross entropy averaged all through the batch, we compute db moreover by averaging all through the samples.
Up to proper right here, we completed our model. The change() carry out merely applies the gradients found by the back-propagation to the parameters W and b using the gradient descent change rule.
To try our model, we make use of scikit-learn to generate a classification dataset:
1
2
3
4
5
6
from sklearn.datasets import make_circles
from sklearn.metrics import accuracy_score
# Make information: Two circles on x-y plane as a classification disadvantage
y=y.reshape(–1,1)# our model expects a 2D array of (n_sample, n_dim)
after which we assemble our model: Input is two-dimensional and output is one dimensional (logistic regression). We make two hidden layers of 4 and three neurons respectively:
1
2
3
4
5
6
7
8
9
# Build a model
model=mlp(layersizes=[2,4,3,1],
activations=[relu,relu,sigmoid],
derivatives=[drelu,drelu,dsigmoid],
lossderiv=d_cross_entropy)
model.initialize()
yhat=model.forward(X)
loss=cross_entropy(y,yhat)
print(“Before teaching – loss price {} accuracy {}”.format(loss,accuracy_score(y,(yhat>0.5))))
We see that, beneath random weight, the accuracy is 50%:
1
Before teaching – loss price [[693.62972747]] accuracy 0.5
Now we follow our neighborhood. To make points straightforward, we supply out full-batch gradient descent with mounted learning worth:
1
2
3
4
5
6
7
8
9
10
# follow for each epoch
n_epochs=150
learning_rate=0.005
forninrange(n_epochs):
model.forward(X)
yhat=model.a[–1]
model.backward(y,yhat)
model.change(learning_rate)
loss=cross_entropy(y,yhat)
print(“Iteration {} – loss price {} accuracy {}”.format(n,loss,accuracy_score(y,(yhat>0.5))))
and the output is:
1
2
3
4
5
6
7
8
9
10
Iteration 0 – loss price [[693.62972747]] accuracy 0.5
Iteration 1 – loss price [[693.62166655]] accuracy 0.5
Iteration 2 – loss price [[693.61534159]] accuracy 0.5
Iteration 3 – loss price [[693.60994018]] accuracy 0.5
…
Iteration 145 – loss price [[664.60120828]] accuracy 0.818
Iteration 146 – loss price [[697.97739669]] accuracy 0.58
Iteration 147 – loss price [[681.08653776]] accuracy 0.642
Iteration 148 – loss price [[665.06165774]] accuracy 0.71
Iteration 149 – loss price [[683.6170298]] accuracy 0.614
Although not wonderful, we see the event by teaching. At least throughout the occasion above, we’ll see the accuracy was as a lot as larger than 80% at iteration 145, nonetheless then we observed the model diverged. That can be improved by decreasing the academic worth, which we didn’t implement above. Nonetheless, this reveals how we computed the gradients by back-propagations and chain pointers.
The full code is as follows:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
from sklearn.datasets import make_circles
from sklearn.metrics import accuracy_score
import numpy asnp
np.random.seed(0)
# Find a small float to avoid division by zero
epsilon=np.finfo(float).eps
# Sigmoid carry out and its differentiation
def sigmoid(z):
return1/(1+np.exp(–z.clip(–500,500)))
def dsigmoid(z):
s=sigmoid(z)
return2*s *(1–s)
# ReLU carry out and its differentiation
def relu(z):
returnnp.most(0,z)
def drelu(z):
return(z>0).astype(float)
# Loss carry out L(y, yhat) and its differentiation
def cross_entropy(y,yhat):
“”“Binary cross entropy carry out
L = – y log yhat – (1-y) log (1-yhat)
Args:
y, yhat (np.array): nx1 matrices which n are the number of information conditions
Returns:
frequent cross entropy price of type 1×1, averaging over the n conditions
y=y.reshape(–1,1)# our model expects a 2D array of (n_sample, n_dim)
print(X.type)
print(y.type)
# Build a model
model=mlp(layersizes=[2,4,3,1],
activations=[relu,relu,sigmoid],
derivatives=[drelu,drelu,dsigmoid],
lossderiv=d_cross_entropy)
model.initialize()
yhat=model.forward(X)
loss=cross_entropy(y,yhat)
print(“Before teaching – loss price {} accuracy {}”.format(loss,accuracy_score(y,(yhat>0.5))))
# follow for each epoch
n_epochs=150
learning_rate=0.005
forninrange(n_epochs):
model.forward(X)
yhat=model.a[–1]
model.backward(y,yhat)
model.change(learning_rate)
loss=cross_entropy(y,yhat)
print(“Iteration {} – loss price {} accuracy {}”.format(n,loss,accuracy_score(y,(yhat>0.5))))
Further readings
The back-propagation algorithm is the center of all neural neighborhood teaching, it doesn’t matter what variation of gradient descent algorithms you used. Textbook resembling this one lined it:
Previously moreover carried out the neural neighborhood from scratch with out discussing the maths, it outlined the steps in bigger component:
How to Code a Neural Network with Backpropagation In Python (from scratch)
Summary
In this tutorial, you found how differentiation is utilized to teaching a neural neighborhood.
Specifically, you found:
What is a whole differential and the best way it is expressed as a sum of partial differentials
How to particular a neural neighborhood as equations and derive the gradients by differentiation
How back-propagation helped us to particular the gradients of each layer throughout the neural neighborhood
How to rework the gradients into code to make a neural neighborhood model
Get a Handle on Calculus for Machine Learning!
Feel Smarter with Calculus Concepts
…by getting a larger sense on the calculus symbols and phrases
Discover how in my new Ebook: Calculus for Machine Learning
It offers self-study tutorials with full working code on: differntiation, gradient, Lagrangian mutiplier technique, Jacobian matrix, and reasonably extra…
Bring Just Enough Calculus Knowledge to Your Machine Learning Projects
See What’s Inside
More On This Topic
A Gentle Introduction to the Rectified Linear Unit (ReLU)
Ensemble Learning Methods for Deep Learning Neural Networks
When to Use MLP, CNN, and RNN Neural Networks
Deep Learning Models for Human Activity Recognition
A Gentle Introduction to Dropout for Regularizing…
A Tour of Recurrent Neural Network Algorithms for…
ToolsNess Special Offers Get a FREE domain when you buy Shared hosting! Save up to 80% on Domain & Shared Hosting bundle Just $0.99! Get a popular domain today! Namecheap Bundle Deals: FREE domains & 45% off shared hosting! As a coverage proprietor of life insurance , incapacity coverage, annuity, or long-term care , it’s pure to be involved about what would occur to your advantages in case your insurance coverage firm goes bankrupt. It will not be as dangerous as you assume. Rehabilitation Previous to Chapter Previous to an insurance coverage firm chapter, the insurance coverage firm will undergo a course of referred to as rehabilitation dictated by the legal guidelines of the state, whereby the state insurance coverage fee will make each try to assist the corporate regain its monetary footing. Whether it is decided that the corporate can’t be rehabilitated, then the corporate is said bancrupt or bankrupt, and the court docket orders the liquidation of the corporate....
Envision a world the place duties as mundane as scheduling an appointment to as clever as detecting ailments will be entrusted to an automatic system. Artificial Intelligence (AI) turns this imaginative and prescient into actuality and revolutionizes the know-how business at an unprecedented tempo. Aspiring to navigate this enthralling realm of AI requires a complete understanding of its fundamentals, mastering the instruments of the commerce, and finally implementing these in real-world initiatives. AI comes with its unbelievable philosophy and historical past and will be delineated into two main varieties – Narrow and General. Furthermore, the functioning of AI rests on key applied sciences resembling machine studying and neural networks which kind its basis. This path additionally necessitates proficient experience in a programming language, ideally Python, and instruments resembling TensorFlow or PyTorch and a command over Machine Learning algorithms. Understanding AI Basics I...
Raising your deductible and Older motorcar – Drop comprehensive / collision coverage. Deductible is that the quantity you pay from your pocket before creating associate claim. The disadvantage of raising your claim is once you build a claim, you’ll pay more. However, if you’re a secure driver, you will overtime save more cash by raising your insurance deductible. cross-check your previous insurance claim history and make a discreet call for yourself. If your automotive isn’t value much, why get comprehensive and collision insurance coverage. you’ll be {able to} visit a myriad of on-line sites to search out true worth of your car. to boot your factor may well be able to pull up truth worth of your vehicle. Taking advantage of low mileage and Moving – take into account insurance costs. Some motorcar insurance firms can provide discounts if you drive under a particular variety of miles or drive less than a certain distance to work. If you’re cons...




")







{kind=link}
Comments
Post a Comment